篇首语:本文由编程笔记#小编为大家整理,主要介绍了论文精读:Neural Architecture Search without Training相关的知识,希望对你有一定的参考价值。
手工设计深度神经网络所花费的时间和精力是巨大的,这推动了神经架构搜索(Neural Architecture Search,NAS)技术的发展,以实现自动化设计。然而,NAS算法往往速度慢且成本昂贵;它们需要训练大量的候选网络,以便为搜索过程提供信息。如果我们能够从网络的初始状态部分预测其训练的精度,这一问题就可以得到缓解。
在这项工作中,作者测验了未经训练的网络中数据点之间的激活重叠,并激励如何能够给出有效表明网络训练性能的度量。作者将这种方法整合到一个简单的算法中,该算法允许我们在几秒钟内在单个GPU上搜索强大的网络,而无需任何训练,并在NAS-Bench-101、NAS-Bench-201、NATS Bench和NDS(Network Design Spaces)上验证了其有效性。
最终,作者的算法能够在30s内在NAS-Bench-201搜索空间上搜索到精度为92.81%的网络,比传统NAS方法快了几个数量级。
Paper:https://arxiv.org/abs/2006.04647
Code:https://github.com/BayesWatch/nas-without-training
Time | Paper | Author | Method | [Dis]advantages |
|---|---|---|---|---|
2017 | Neural architecture search with reinforcement learning | Zoph & Le | 作者使用RNN控制器来生成候选网络,并对候选网络进行训练,使用强化学习更新控制器,以提高其生成的候选网络的质量 | 控制器每次的输出结构都要进行训练,成本较高,作者使用800个GPU在CIFAR10数据集上训练了28天;缺乏灵活性,最终获得的网络是固定的,不能扩展,即不能用于移动设备或其他数据集 |
2018 | Learning transferable architectures for scalable image recognition | Zoph et al. | 在神经单元块上搜索,而不是在整个架构上搜索。即作者搜索一个标准单元和一个简化单元(合并池)进行CIFAR10分类,然后将其用作ImageNet分类的更大网络的单元块 | 在数量上更加灵活,单元块可以根据预算进行调整;500个GPU训练了4天 |
2018 | Efficient neural architecture search via parameter sharing | Pham et al. | 允许候选网络共享权重,以便进行联合训练 | 降低了搜索的计算成本,使用单个GPU在CIFAR10数据集上运行了半天 |
2020 | Evaluating the search phase of neural architecture search | Yu et al. | 证明了共享权重方法抑制了对最佳网络结构的搜索,使随机搜索成为一种极其有效的NAS基线 | / |
对于一些从业者来说,NAS仍然很慢。在硬件感知设置中,能够快速(即以秒为单位)执行NAS将非常有用,在该设置中,每个设备和任务通常需要单独搜索。
Time | Paper | Author | Method | [Dis]advantages |
|---|---|---|---|---|
2019 | FBNet: Hardwareaware efficient convnet design via differentiable neural architecture search | Wu et al. | / | / |
2019 | MnasNet: Platform-aware neural architecture search for mobile | Tan et al. | / | / |
评估NAS算法有效性的主要障碍是搜索空间(所有可能网络的集合)太大,无法进行详尽的评估。下面介绍几个常用的benchmarks:
| Benchmarks | Introduction |
|---|---|
NAS-Bench 101 | 包含423624个神经网络,在CIFAR10数据集上经过了108个epoch的训练,使用了三种不同的初始化 |
NAS-Bench 201 | 包含15625个神经网络,CIFAR10/CIFAR100/ImageNet-16-120数据集上训练了多次 |
NATS-Bench | 有两种搜索空间:拓扑搜索空间NATS-Bench TSS,包含15625个神经网络,也就是NAS-Bench 201;大小搜索空间NATS-Bench SSS,包含32768个神经网络,这些网络之间的cells通道数不同。 |
作者的目标是设计一种方法,在初始化时对网络架构进行评分,以表示其最终训练的精度,这样就可以使用成本低廉的计算方法来代替NAS算法中昂贵的训练步骤。
给定一个具有修正线性单元(rectified linear units, RELU)的神经网络,我们可以在每层的每个RELU单元上确定一个关于该单元是未激活(值为负,因此乘以零)还是已激活(在这种情况下,其值乘以一)的二进制指标。固定这些指标变量,现在网络由线性算子局部定义,该算子通过将散布在每个层上的线性映射(the linear maps)与二进制校正单元(the binary rectification units)相乘而获得。
mini-batch data
X
=
x
i
i
=
1
N
X = \\x_i\\_i=1^N
X=xii=1N可以通过神经网络映射为
f
(
x
i
)
f(x_i)
f(xi),
f
f
f中
x
x
x处RELU单元的指示变量形成一个定义线性区域(the linear region)的二进制码
c
i
c_i
ci。与两个输入相关联的二进制码越相似,网络学习分离这些输入就越具有挑战性,当两个输入具有相同的二进制码时,它们位于网络的相同线性区域内,因此特别难以分离。相反,当输入被很好地区分时,学习应该更容易。下图可视化了ReLU单元的二进制激活码对应的线性区域:
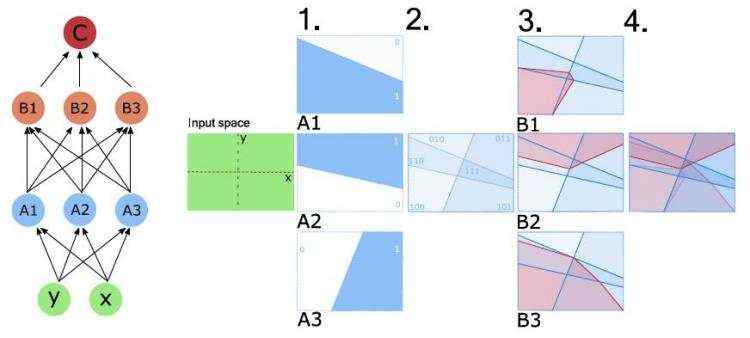
其中,1. 每个ReLU节点
A
i
A_i
Ai将输入拆分为激活区域(>0)和非激活区域,我们将激活区域标记为1,非激活区域标记为0;2. 与每个节点
A
i
A_i
Ai相关联的激活和非激活区域相交,具有相同激活模式的输入空间(input space)区域是共线的(co-linear);3. 下一层的ReLU节点
B
B
B将空间进一步划分为激活区域和非激活区域;4. 给定节点上的每个线性区域都可以由其前面的所有ReLU节点的激活模式唯一定义。
作者用汉明距离(Hamming distance)
d
H
(
c
i
,
c
j
)
d_H(c_i, c_j)
dH(ci,cj)来衡量两个输入(未训练网络的输入二进制码)的不相似程度(也可以说是相似性程度),因此可以通过计算核矩阵(kernel matrix)
K
H
K_H
KH来测验整个小批量数据的二进制码之间的对应关系:
K
H
=
(
N
A
−
d
H
(
c
1
,
c
1
)
…
N
A
−
d
H
(
c
1
,
c
N
)
⋮
⋱
⋮
N
A
−
d
H
(
c
N
,
c
1
)
…
N
A
−
d
H
(
c
N
,
c
N
)
)
K_H = \\beginpmatrix N_A-d_H(c_1, c_1) & \\dots & N_A-d_H(c_1, c_N) \\\\ \\vdots & \\ddots & \\vdots \\\\ N_A-d_H(c_N, c_1) & \\dots & N_A-d_H(c_N, c_N) \\endpmatrix
KH=⎝⎜⎛NA−dH(c1,c1)⋮NA−dH(cN,c1)…⋱…NA−dH(c1,cN)⋮NA−dH(cN,cN)⎠⎟⎞ 其中,
N
A
N_A
NA是网络中RELU单元的数量,
N
N
N是mini-batch的大小,这里是128。
这一点理解有些别扭,核矩阵
K
H
K_H
KH衡量的是不同数据输入的相似性程度,相似性程度越低,
K
H
K_H
KH越接近于对角线。
高性能网络具有较少的非对角元素和较高的相似性(如下图),可以利用这一观察结果来预测未经训练的网络的最终性能,作者使用以下公式来评估模型的性能:
s
=
l
o
g
∣
K
H
∣
s=log |K_H|
s=log∣KH∣
K
H
K_H
KH越接近于对角线(最好只有对角线,也就是相似性越低,即不相似性越高),
s
s
s越高,表示训练后的模型精度更高。
举个简单的栗子:
假设
K
H
=
(
a
b
c
d
)
K_H = \\beginpmatrix a & b \\\\ c & d \\endpmatrix
KH=(acbd),则
∣
K
H
∣
=
∣
a
b
c
d
∣
=
a
d
−
b
c
|K_H| = \\beginvmatrix a & b \\\\ c & d \\endvmatrix=ad-bc
∣KH∣=∣∣∣∣acbd∣∣∣∣=ad−bc,当b=c=0时,
∣
K
H
∣
|K_H|
∣KH∣有最大值,即
K
H
=
(
a
0
0
d
)
K_H = \\beginpmatrix a & 0 \\\\ 0 & d \\endpmatrix
KH=(a00d),此时
K
H
K_H
KH是一个对角矩阵,也就是只有主对角线元素有值,其它位置均为0。此时的
K
H
K_H
KH表示的相似性程度最低,相应的
s
c
o
r
e
score







 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 
